視覺引導卸棧
視覺引導機器人將紙箱、週轉箱、麻布袋等物體從托盤上依照需求拆卸,並放置於托盤或相關設備上(如破袋設備、輸送帶等)。
支援混合卸棧
支援混合紙箱堆疊形式的識別和拆卸,無需事先指定棧板型式。
智能程度高
支援緊密貼合的紙箱、週轉箱等,可應對紙箱表面捆帶、膠帶、圖案、反光膜、麻布袋變形、褶皺等複雜情況。
智能路徑規劃
內建碰撞檢測、路徑規劃等多種演算法,可有效避免碰撞,根據實際情況一次抓取單個或多個物體。
簡單易學、快速部署
可視化編程界面,一鍵模擬。用戶無需編寫程式,經過簡單教育訓練即可操作機器人。
適用於各種常見堆棧型式
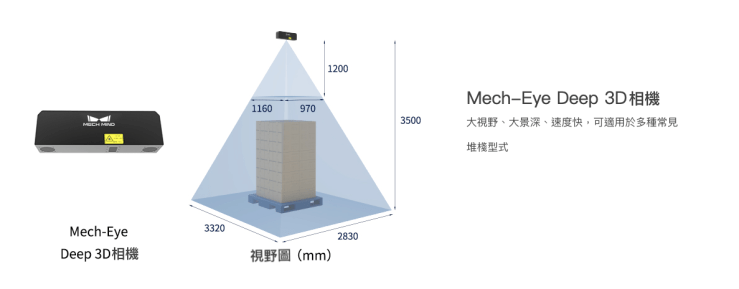
工業級 3D 相機,精度高、大視野,可處理多種不同常見堆棧型式(如 1.2 m × 1.2 m × 1.8 m 尺寸的棧板)。
性價比高
價格僅為典型同類國外產品二分之一至三分之一。
方案參數
| 標準精度 | 1 mm @ 3 m,3 mm @ 3 m(可按要求定製遠距離高精度相機 ) |
| 工作距離 | 1500 mm – 3500 mm |
| 節拍 | 每小時可處理近900件紙箱(整體實際節拍與佈局、末端執行器及後續工藝相關) |
| 棧板型式 | 支援多種常見型式(如1.2 m × 1.2 m × 1.8 m尺寸的棧板) |
| 物體種類 | 支援紙箱、麻袋、週轉箱等多種物體 物體(紙箱、麻布袋等)可緊密貼合(最小距離為0)或傾斜放置 支援圖案、膠帶等複雜情況 |
| 穩定性 | 智能路徑規劃算法,保證穩定性,避免碰撞 |
| 可搭配機器人 | 可搭配各種主流品牌機器人,如ABB、KUKA、YASKAWA、Kawasaki、珞石、配天、達明、埃斯頓等 |
| 通訊協議 | 透過以太網TCP/IP協議通訊,可搭配各種PLC |
| 常見相機型號 | Mech-Eye Deep、Mech-Eye Laser L |
視覺引導混合卸棧
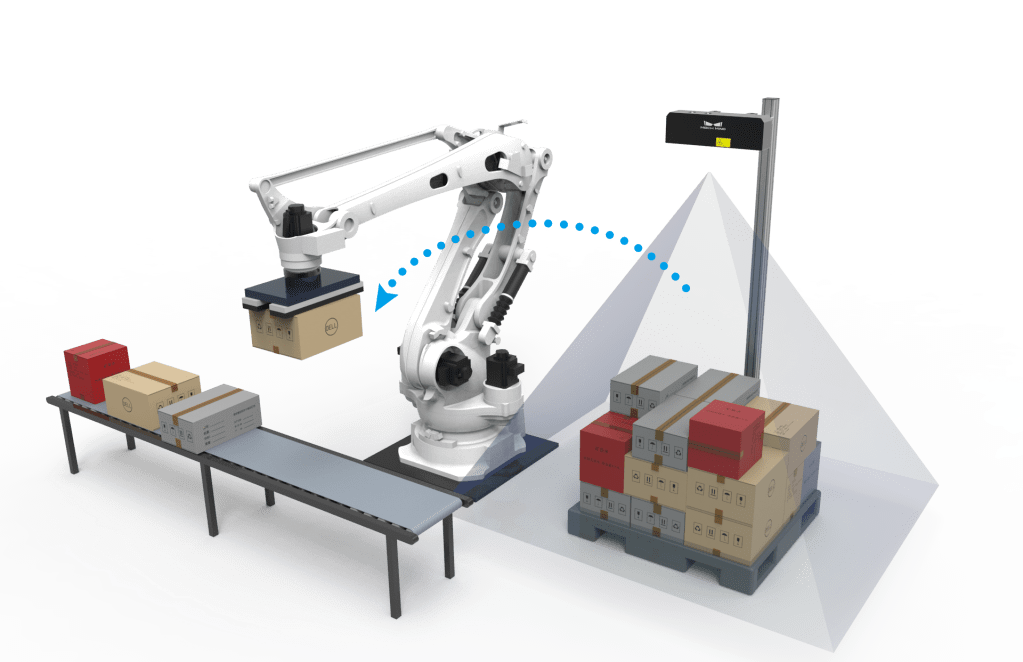
- 梅卡曼德工業級3D相機,高精度、大視野、大景深,專為卸棧應用設計
- 人工智能算法,可識別圖案、尺寸不同的紙箱並逐一從托盤上卸下
- 無需事先指定棧板型式,紙箱可緊密貼合,亦可隨意擺放,每小時可處理近900件紙箱
- 可應對傾斜、貼合,以及面單、膠帶、扎帶等複雜情況
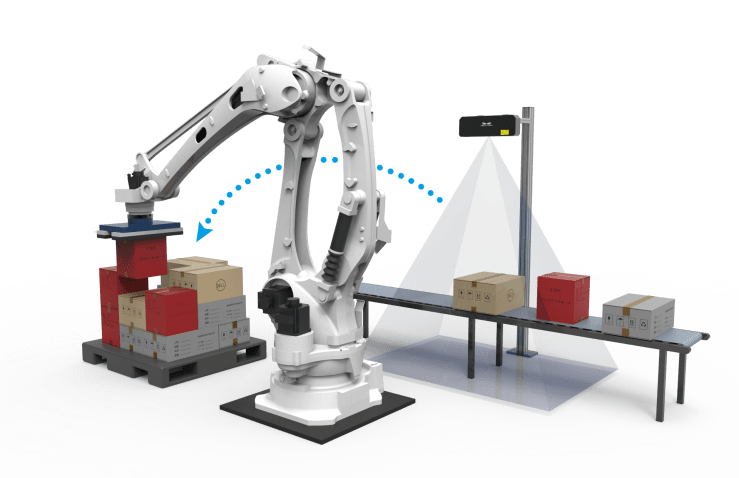
視覺引導混合堆棧
離線堆棧
- 提前獲取訂單所有箱型規格和數量,智能堆棧演算法計算最優堆棧型式(穩定且充分利用托盤空間),並輸出紙箱來料順序
- 無需編寫代碼,完全可視化調試、部署
在線混合堆棧
- 採用梅卡曼德工業級 3D 相機,快速、高精度測量紙箱尺寸,可實現任意來箱規格、來箱順序的混合堆棧
- 智能路徑規劃算法,自動選擇合適的機器人進入角度,避免碰撞
- 堆棧形式穩定且可充分利用空間
智能混合堆棧演算法
梅卡曼德自主研發的智能混合堆棧演算法,可讓機器人根據箱子尺寸及棧板型式找到合適的堆疊位置和進入角度,避免碰撞,保證穩定性。
Mech—Vision圖形化機器視覺軟體
圖形化的算法處理軟體Mech-Vision,將所有代碼簡化為步驟,用戶無需編寫任何代碼即可進行演算法編輯。完全開放性的後台,用戶可根據需求進行個性化定製,添加所需演算法內容。
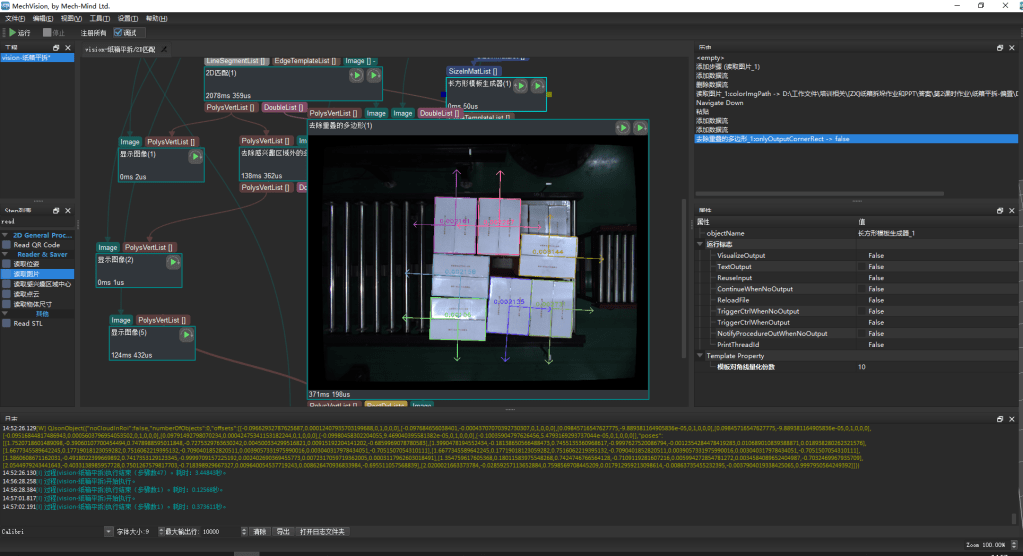
- 圖形化、無代碼的界面,簡潔的UI設計,功能分區明確。用戶無須任何專業的編程技能,即可完成視覺工程的搭建。亦支援整合商自行開發。
- 軟體內建深度學習演算法模組,可滿足複雜,多樣的實際需求,應對物體堆疊、一定程度反光、暗色等問題,完成複雜條件下的識別、定位、測量等視覺功能。
- 整合不規則上料、紙箱卸棧、快遞包裹供包、免註冊貨品抓取、高精度定位、引導塗膠等多種應用套件,用戶可輕鬆部署多個智能機器人典型應用。
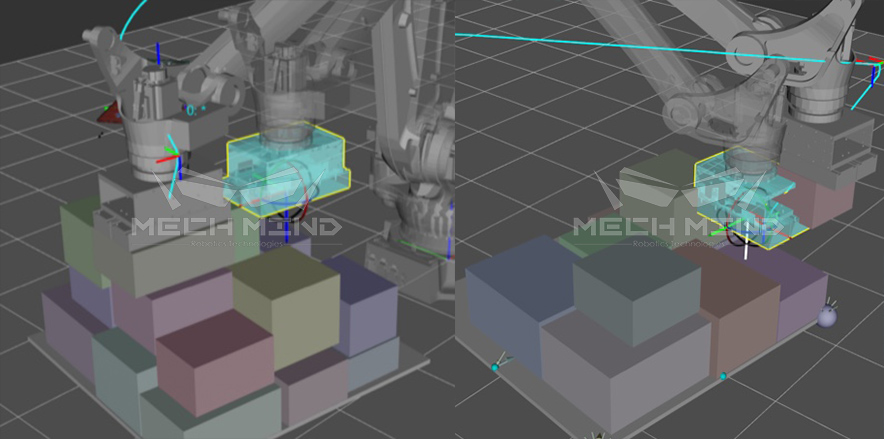
Mech—Viz機器人智能編程環境
Mech-Viz實際操作界面圖(卸棧應用),下圖左側界面一鍵模擬,可直接看到機器人的運動路徑、箱子的識別效果及碰撞模型;右側為機器人操作流程,簡單易學。

- 圖形化、無代碼的界面,可一鍵模擬機器人運動。用戶無須任何專業的編程技能,即可操作機器人。
- 內建路徑規劃,碰撞檢測,抓取規劃、混合堆棧等演算法,幫助提升穩定性。
- 用戶只需經過簡單培訓,即可操作機器人。
- 軟體目前已適配了國內外大部分主流品牌的機器人。新品牌機器人的適配只需要3 – 5天。